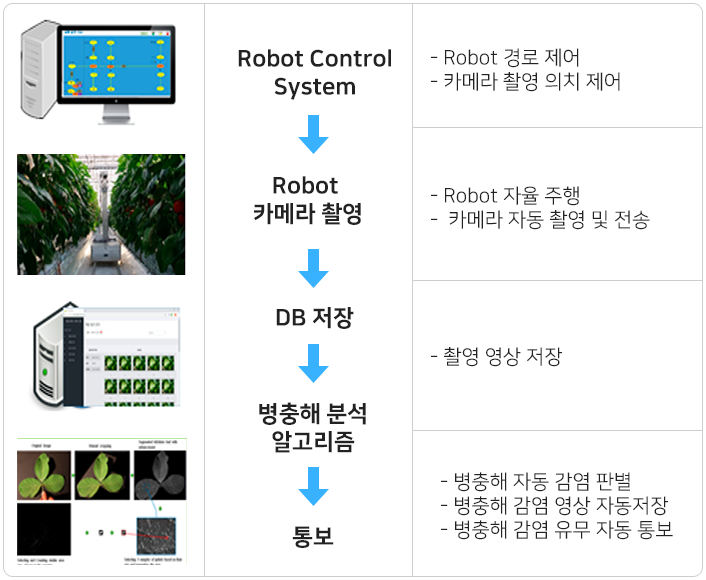
예찰로봇


점검로봇
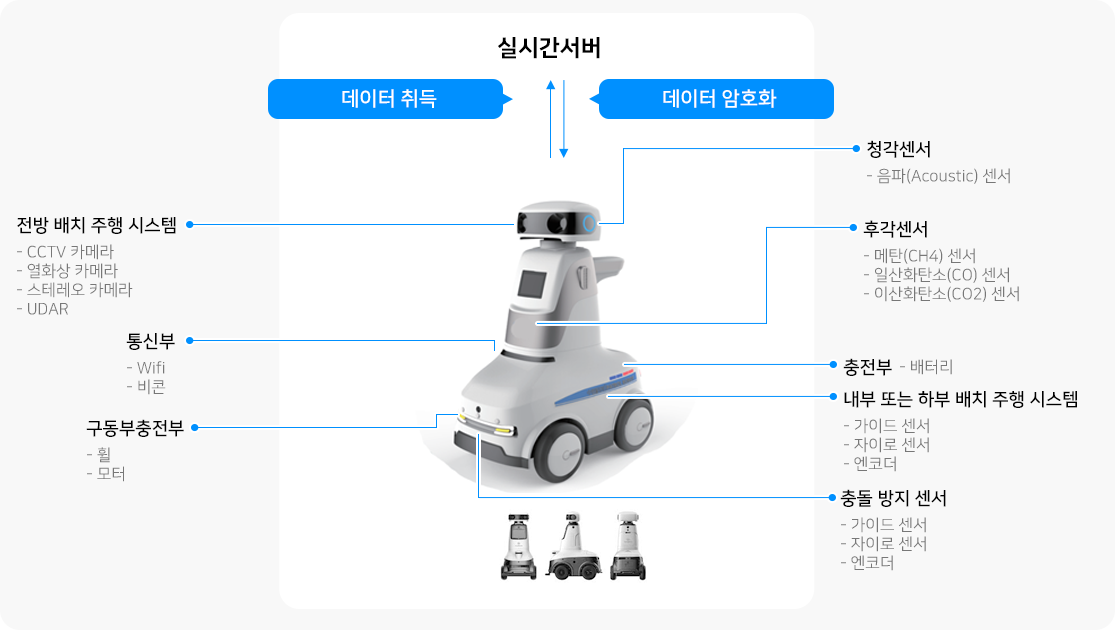
SLAM(Simultaneous Localization and Mapping)기반 자율주행 점검 로봇
 주요기능
주요기능
자율이동식 패트롤
- 24시간 상시 운영, 감시 주기 설정
- 아날로그 계측기 수치 확인
- 자율주행 패트롤, 자동 충전 기능
- 침입자 Following 점검 구역 이동
- 장애물 인식 정지 및 회피
- 광학줌 18배, 좌우 360도 및 상하 90도 회전
- 영상기반 정밀거리 인식 자동 충전 기능
데이터 수집 및 전송
- CCTV 카메라, 열화상 카메라, TOF 카메라
- 음파센서로 설비 이상 감시
- 유해가스(연료(CH4), 화재(CO), CO2) 누설 측정 기능
- 데이터 송수신 암호화 모듈(LEA 알고리즘) 탑재
- oneM2M 플랫폼 지원
점검 로봇 네트워크
- 통신 방식 / 주기 설정
- 실시간 경로, 임무 관리
- Wifi 무선 네트워크 통신 지원
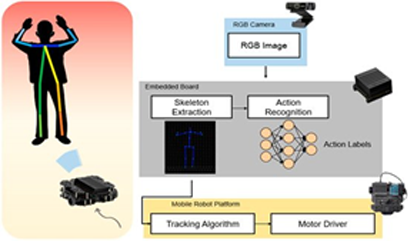
인공지능 기반의 객체 인식, 패턴 인식

주요기능
주요 모듈
- 엔비디아 병렬 GPU 사용
데이터 취득
- 데이터 거리 취득
- 렌즈 왜곡 보정 및 3D 포인트 클라우드 변화
- 사람 인식, 배경 추출
주요 케이스
- 출입제한 구역 감시
- 장애물 인식
- 점검자/침입자 탐지 및 Following
이미지 처리 프로세스
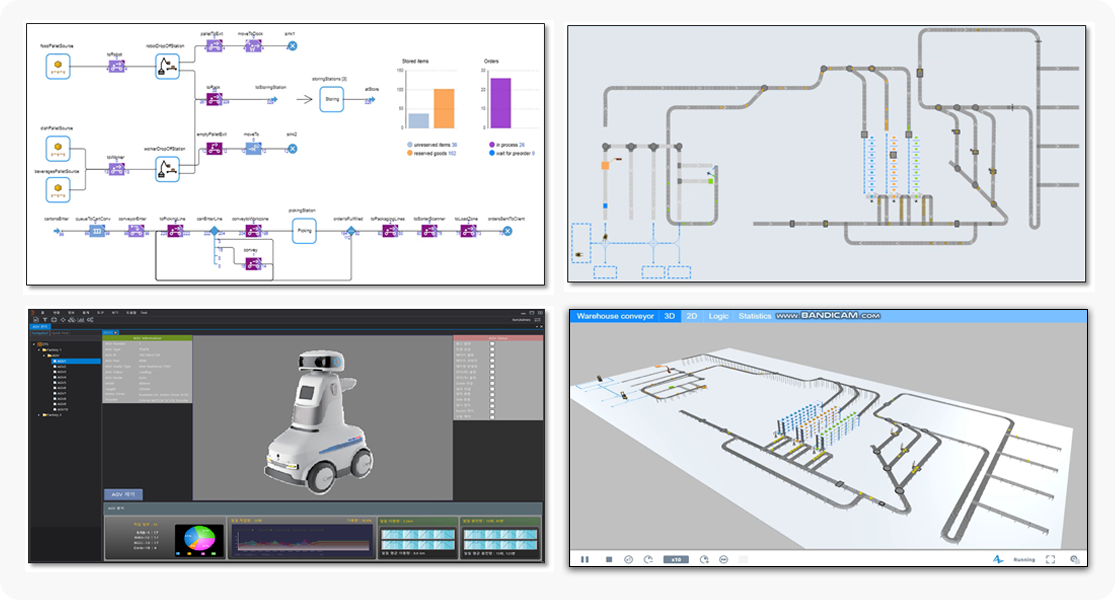
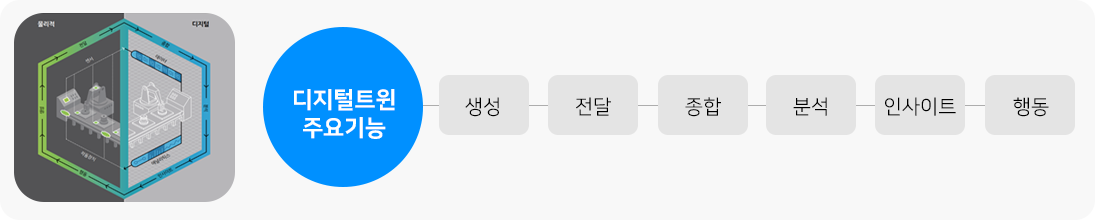
디지털 트윈
단위 프로세스를 연결하고 통합하는 표준화 작업으로 다양한 가상 프로세스 구축 서비스
주요기능
데이터 가공
- 현실의 객체 운용에서 발생 관철되는 의미있는 데이터(수집/전달/처리 기능)
- 해당 객체에 대한 진화/변경 가능한 디지털 모델(모델링 및 튜닝 SW)
- 자율주행 패트롤, 자동 충전 기능
2D/3D 그래픽스
- 3D 객체 설계 및 운용/결과 시각화를 위한 그래픽스 모듈
- 사용자 편의 인터페이스
런타임 엔진 및 연동
- 객체의 속성, 프로세서, 다이나믹스 등 시계열 데이터 연계
- 디지털 모델들의 실행/시뮬레이션 환경
결정 / 제어 기능
- 진단/분석/예측 결과의 현실 반영을 위한 제어 정보(결정/제어 SW, 인적요소 포함)
- 본사 : 서울특별시 금천구 두산로 70, A동 7층 708호 (독산동, 현대지식산업센터)
- 기술연구소 : 서울특별시 강남구 선릉로112길 14, 3층 (삼성동, JS빌딩))
- 회사설립 : 2008년2월4일 / 대표 : 이문숙 / 대표메일 : master@induswell.com